机器人是怎么构成的?机器人本体主要包括哪几部分?
2020-11-25 11:35:39来源:广晟德
机器人目前是典型的机电一体化产品,一般由机械本体、控制系统、传感器、驱动器和输入/输出系统接口等五部分组成。其中机器人本体部分组成就是机械部分、传感部分和控制部分组成,这里为大家分享一下。
一、机器人本体机械部分
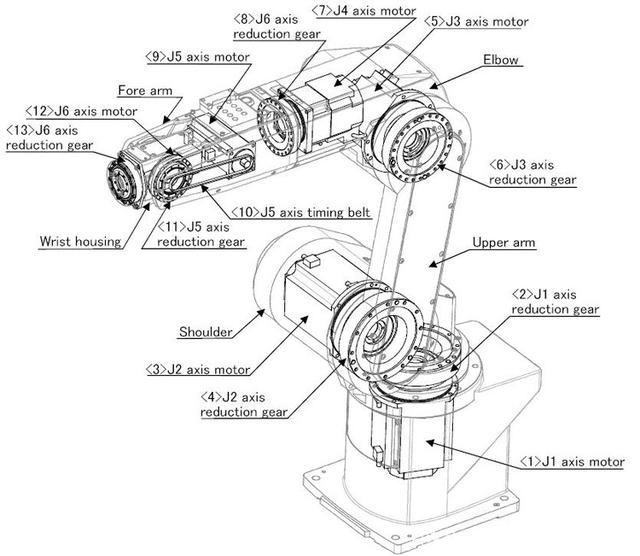
机器人的机械结构系统由机身、手臂、末端操作器三大件组成。每一大件都有若干自由度,构成一个多自由度的机械系统。机器人按机械结构划分可分为直角坐标型机器人、圆柱坐标型机器人、极坐标型机器人、关节型机器人、SCARA型机器人以及移动型机器人。
二、机器人本体传感部分
它由内部传感器模块和外部传感器模块组成,获取内部和外部环境中有用的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化水平。人类的感受系统对感知外部世界信息是极其巧妙的,然而对于一些特殊的信息,传感器比人类的感受系统更有效。
三、机器人本体控制与驱动部分
控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。 根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。
驱动系统是向机械结构系统提供动力的装置。采用的动力源不同,驱动系统的传动方式也不同。驱动系统的传动方式主要有四种:液压式、气压式、电气式和机械式。电力驱动是目前使用最多的一种驱动方式,其特点是电源取用方便,响应快,驱动力大,信号检测、传递、处理方便,并可以采用多种灵活的控制方式,驱动电机一般采用步进电机或伺服电机。
其实这种机器人之所以能够实现这么流畅的动作,不仅仅是微型计算机的控制技术,也是与伺服电动机的飞速发展息息相关的。
机器人的伺服电机系统,设备在感知外界信息后会快速传递给控制器,然后控制器会发出控制信号驱动伺服电机系统快速进行姿势调整。伺服电机系统在这里就是利用各种电机产生的力矩和力,直接或间接地驱动机器人本体来获得机器人的各种运动。
责任编辑:hnmd003
相关阅读
-

-

-

延缓写入失败怎么回事?Win7提示Windows延缓写入失败怎么解决?
最近有Win7用户反映,将电脑强制关机再开机之后,电脑右下角就会出现提示Windows延缓写入失败,并且有些...
2020-12-30 -

-

-